

1. 서 론
2. 재료 및 방법
2.1 조사장비
2.2 현장 조사 및 분석 방법
3. 결 과
3.1 Dive #1 (37°10.7373′N, 131°58.4192′E)
3.2 Dive #2 (37°10.0371′N, 131°58.3193′E)
3.3 Dive #3 (37°13.0723′N, 131°55.3460′E)
3.4 Dive #4 ( 37°15.0225′N, 131°51.5203′E)
3.5 Dive #5 (37°15.1181′N, 131°51.6905′E)
3.6 Dive #6 (37°18.1443′N, 131°53.3728′E)
4. 고 찰
1. 서 론
빛이 거의 도달하지 못하는 영역인 수심 200 m 이상의 심해역은 전체 지구표면의 약 63%를 차지할 정도로 광대한 곳이다(Herring, 2002). 그러나 높은 압력과 낮은 수온, 암흑 등 심해 환경의 접근 제한성으로 인해 심해용 영상장비 및 유무인 잠수정 기술이 개발된 뒤인 20세기 후반에 와서야 본격적으로 심해에 대한 조사가 이루어지게 되었다(Lutz and Falkowski, 2012; National Research Council, 1996). 잠수정을 활용한 대표적인 초기 심해 탐사는 1974년에 미국 우즈홀해양연구소의 앨빈(Alvin)호, 프랑스 국립해양개발연구소의 아르키메데스(Archimedes)호와 시아나(Cyana)호에 의해서 대서양 중앙 해령에서 수행된 FAMOUS (French-American Mid-Ocean Undersea Study) 탐사인데, 해저 확장설을 확인할 수 있는 학술적 성과를 얻었다(Hammond, 1975; MOF, 2014a). 또한, 앨빈호는 4,000 m급의 유인잠수정으로 1979년 동태평양의 열수구(hydrothermal vent)에서 최초의 열수생물 군집을 발견하기도 했고(Hessler and Smithey, 1983), 1985년에는 침몰 여객선 타이타닉호를 북극해에서 찾아내는 등 많은 활약을 한 바 있다(Monastersky, 2012). 이외에도 현재 활동 중인 6,000 m급 이상의 심해 잠수정으로는 일본의 신카이 6500호(Shinkai 6500), 미국의 씨클리프(Sea Cliff)호와 프랑스의 노틸(Nautile)호, 소련의 미르(Mir)호, 최근 건조된 중국의 7,000 m급 잠수정인 자오룽(Jiaolong)호 등이 대표적이다(Kim, 2007; MOF 2014a). 국내에서는 아직 해양과학조사에 활용되고 있는 유인잠수정은 없는데, 2003년 울릉도 근해의 수심 400 m 내외에서 침몰선인 돈스코이호 탐색작업을 위해 외국에서 임차한 1인 유인 소형잠수정으로 해저면 관측을 한 사례가 있었다(You, 2007). 직접적인 심해탐사 연구장비에는 위에서 언급한 유인잠수정 외에도 연구자나 파일럿이 탑승하지 않고 장시간의 조사나 위험요소가 높은 탐험에 광범위하게 사용되어지고 있는 장비인 무인잠수정 즉, ROV (Remotely Operated Vehicle)가 있다. 1953년 프랑스의 드미트리 레비코프가 무인잠수정 푸들(Poodle)을 개발하면서 시작된 무인잠수정은 1966년 미국에서 비행기 사고로 해저에 분실된 수소폭탄을 회수하고, 1968년 침몰한 구소련 잠수함을 찾아 인양하는 등 군사적 목적으로 활발하게 사용되어지면서 심해탐사장비와 잠수정 기술을 급속하게 발달시켰다(Lutz and Falkowski, 2012; National Research Council, 1996; Lee, 2007). 1970년대 말부터는 각국의 해저유전 개발 경쟁으로 인해 해저 작업을 위한 상업용 무인잠수정 개발이 가속화되고(National Research Council, 2004), 1980년대 들어서는 컴퓨터 기술발전에 힘입어 미국을 비롯하여 프랑스, 영국, 캐나다, 일본, 러시아, 노르웨이, 스웨덴, 이탈리아, 독일, 호주, 중국 등이 무인잠수정을 개발에 착수하여 현재 활발하게 해양과학적인 탐사에 활용되고 있다. 현재 활용되고 있는 대표적인 해양과학조사용 ROV는 미국 우즈홀 해양연구소(WHOI)의 제이슨(JASON)과 메디아(MEDEA), 프랑스 국립해양연구소(IFREMER)의 빅토르 6000(VICTOR 6000), 일본 해양연구개발기구(JAMSTEC)의 가이코우(KAIKO), 캐나나의 로포스(ROPOS), 중국의 해마(海馬)호 등이다(Lutz and Falkowski; Durbin and Durbin, 2012; MOF, 2014a). 우리나라에서는 한국해양과학기술원의 선박해양플랜트연구소에서 해양수산부의 지원을 받아 2001년 5월부터 6년간의 개발기간을 거쳐 6,000 m급 심해 무인잠수정 해미래와 중계기 해누비 시스템을 구축하였다(Lee, 2007; Lee and Seo, 2006). ROV 해미래 시스템이 개발된 이후로 동해에서 몇 차례의 실해역 테스트 탐사가 진행되었고(Choi et al., 2007), 2009년 6월과 11월에는 포항 동쪽 70 km 해저의 메탄가스 분출해역에서 탐사를 수행하고 해저영상을 얻기도 하였으며(MLTM, 2012), 2015년 6월에는 2주간 동해 울릉분지와 후포퇴 사면의 8개 지역을 대상으로 최초의 종합적이고 시범적인 심해탐사가 실시되기도 하였다(Min et al., 2016). 또한 북마리아나 해분의 심해 열수해역에서 다양한 종류의 시료채집과 기기 현장 설치 및 회수 등의 복합적인 작업의 탐사를 성공적으로 수행하였다(Lee et al, 2016). 해미래와 같은 심해탐사용 대형 ROV는 활용시 안정적이고 다양한 종류의 작업이 가능한 반면에 대형선박, 잠수정 임차비 등 고비용과 다수의 전문 지원 인력을 필요로 하여 소규모의 심해 연구 추진에 제한이 많다(MOF, 2014a). 이에 비해 크기가 작은 중소형 ROV는 대형 ROV에 비하여 작업능력이나 탐사 범위가 제한적이긴 하지만, 운용 비용이 상대적으로 매우 저렴하며 작은 선박과 적은 인력으로 운용이 가능하다는 장점이 있어, 국외에서는 2,000년대 전후에 걸쳐 많은 연구기관 및 대학, 기업체에서 다양한 종류의 무인잠수정을 개발하여 상용화되어 있으나(National Research Council, 2004), 국내의 경우 몇 곳의 대학과 연구소에서 개발은 이루어지고 있으나, 아직까지 실제적으로 탐사에 활발하게 활용되어지지는 못하고 있는 실정이다.
이러한 여건 속에서 본 탐사는 대형 ROV의 활용 대안으로 향후 동해의 심해 환경 연구로의 소형 ROV 활용가능성을 확인하기 위해, 지정학적으로 중요한 독도 주변해역의 심해 해산구조의 기초적인 영상 확보를 목적으로 이루어졌다. 국내에서는 해양학적인 목적으로 소형 ROV를 사용하여 처음으로 이루어진 본 조사는 특정 학술적 성과나 특정 실험 목적을 두고 이루어진 조사는 아니지만, 지금까지 실제적인 해저면의 상태를 거시적으로 확인할 수 있는 해양학적 조사가 없던 상황에서 단편적이지만 독도 주변 해산구조의 해저면의 모습과 출현종 관찰, 해저면의 서식지 모습과 퇴적물 특성들을 확인할 수 있는 기회를 제공하고 향후 활용 기반을 구축하기 위해 시도되었다. 또한, 해양 기술적인 측면에서는 기존의 이루어진 일반 해양학적인 독도 주변의 심해연구와는 방법적으로 다른 접근을 시도하여, 소형 ROV를 운용하는 실제적인 기술적인 시도를 통해 탐사에 필요한 기술적 경험을 축적하는 의미에서 앞으로 새로운 연구 분야로의 가능성을 제시하고자 하였다.
2. 재료 및 방법
2.1 조사장비
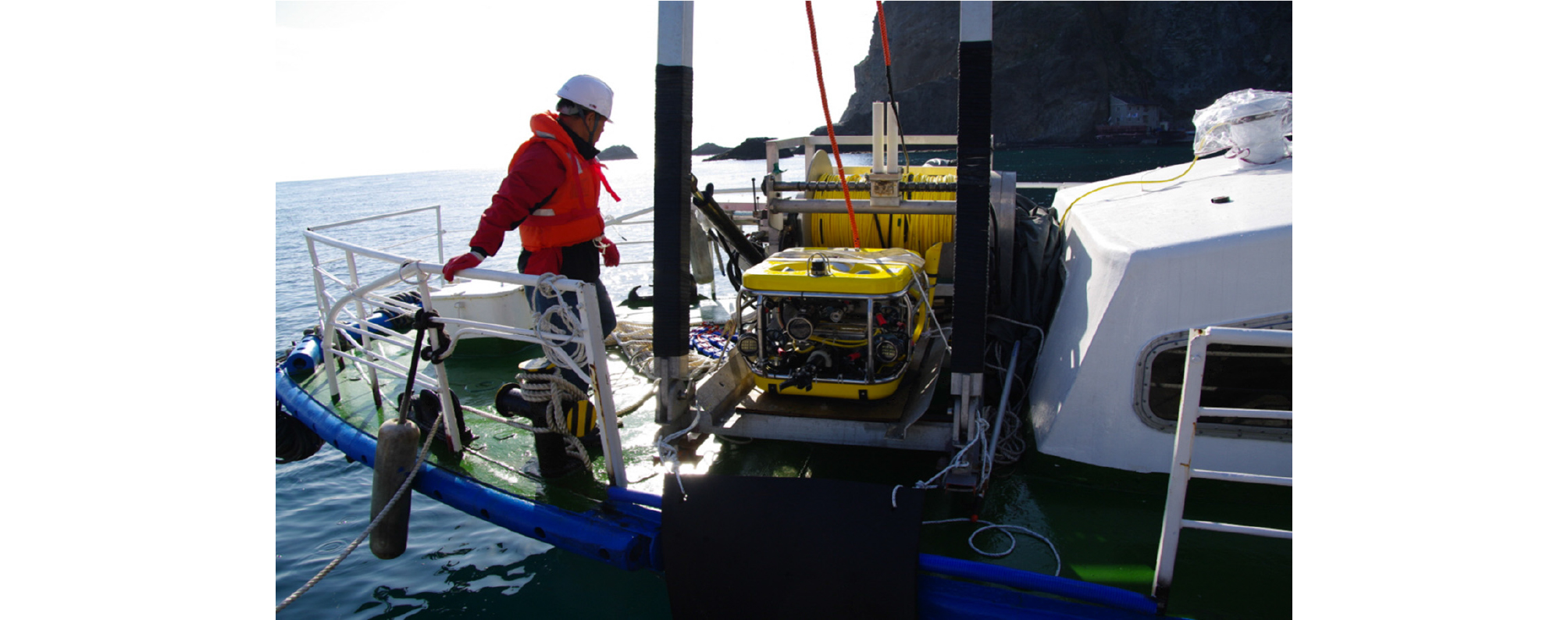
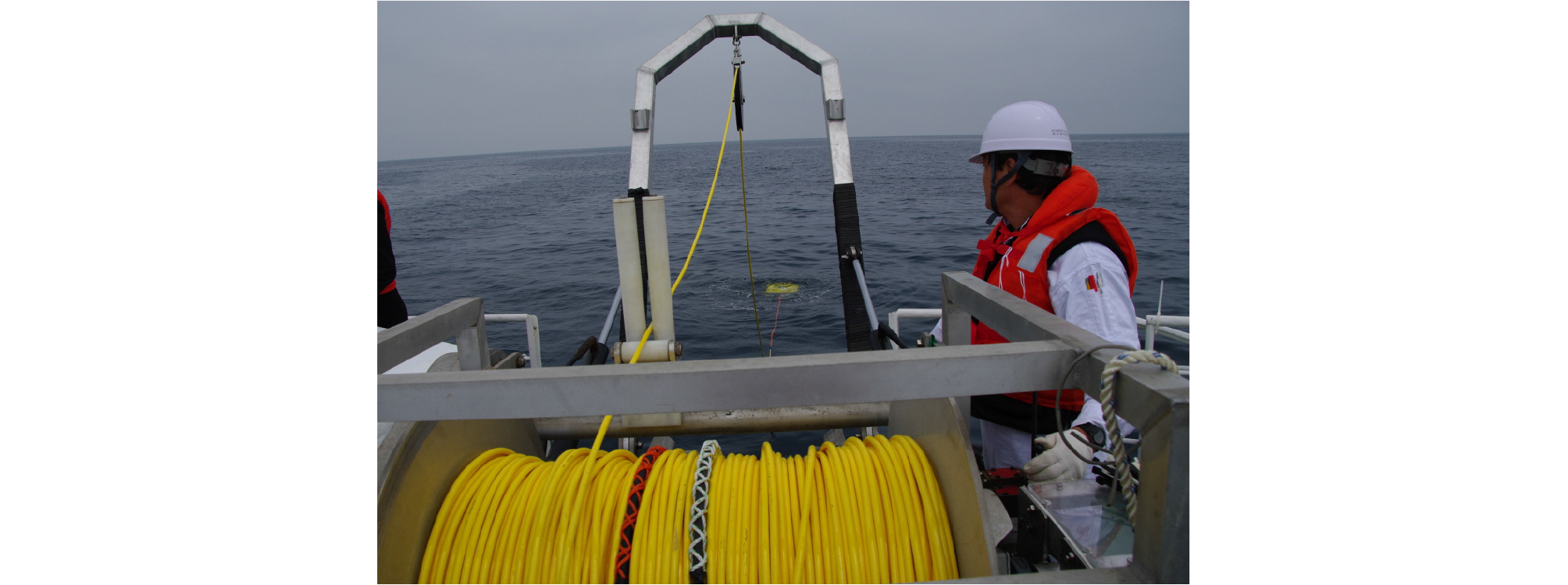
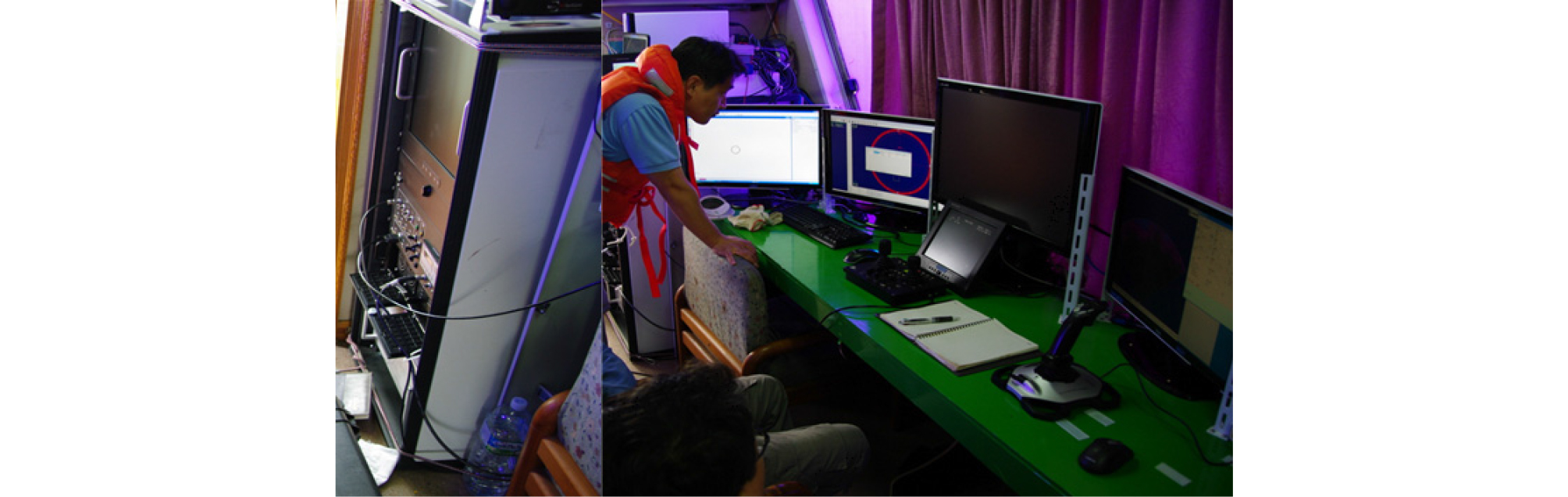
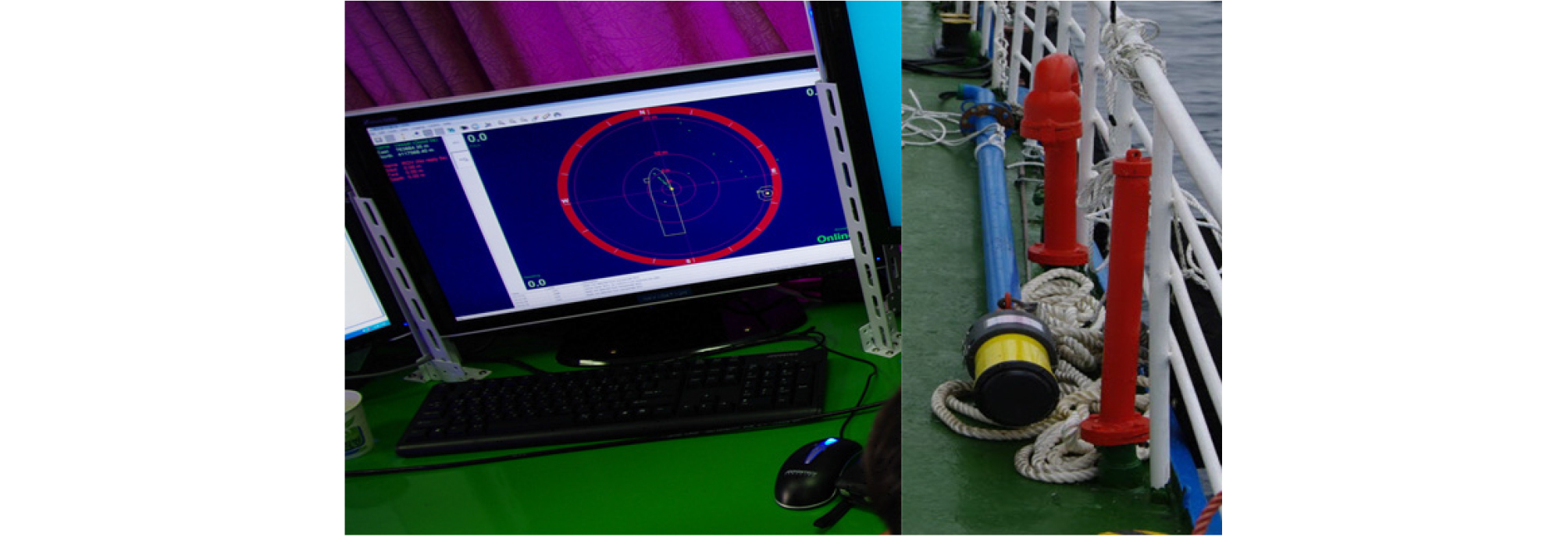
조사에 사용된 ROV 장비는 스웨덴의 Ocean modules사의 V8 SII로서 국내 (주)ROVTS사에 수입되어 (주)코리아쌀베지에서 소유하고 있는 장비를 임대하여 사용하였다. 주요제원으로는 한계수심 500 m, 크기 75×65×55 cm, 무게 60 kg, 적재량 10 kg, 소비전력 3 kw, 추진기 8개, 최고 속도 3 knots, 조도 조정이 가능한 100W급의 고휘도 멀티 LED 조명 2기, HD급 메인 줌 비디오 카메라와 흑백 보조 ccd 카메라를 탑재하였으며, 단일기능의 그립형 로봇팔(manipulator) 1기를 운용할 수 있다(Fig. 1). ROV 지원 시스템으로는 ROV를 하강하기 위한 A형 프레임과 길이 650 m의 중성부력 광케이블 및 유압 윈치를 사용하였다(Fig. 2). ROV의 원할한 하강을 위하여 케이블의 30 m 위치에 30 kg, 혹은 수심에 따라 60 kg의 웨이트를 장착하여 운용하였다. ROV 조종 및 운영을 위한 조종실은 지원모선 내에 위치하며 메인 컴퓨터와 2대의 카메라 모니터, 주조종장치, 카메라 컨트롤러, 전방음파탐지기(sonar) 시스템, 위치파악 시스템, GPS 시스템 등을 구비하였다(Fig. 3). 수중에서의 ROV 위치 파악을 위해 조사선 우측면 수심 2 m 지점에 음파송수신기(transponder)를 설치하고 조종실에서 운용 프로그램 및 전용 모니터를 설치하여 사용하였다(Fig. 4). 탑재된 수중음파탐지기(Sonar)는 전방 수중음파탐지기는 전방향 360° 탐지 가능한 “Tritech Micron scanning sonar”를 사용하였으며, 탐지 범위는 80 m이다. 여본 조사에 사용된 ROV “V8 SII”는 자동 수평 유지 및 프로그램화된 틸팅기능을 탑재하고, 전방향으로 운항이 가능하였으며, 모든 조종은 메인 컴퓨터에 연결된 주조종장치를 사용하도록 되어있었다. ROV 지원 모선은 30 t급 철선인 코쌀 5호로서, 2대의 800마력 엔진이 장착되어 있고, 승선인원은 선장과 기관장을 제외한 10명으로 최고속도 16노트의 제원을 가지며, GPS, 레이더, 음향측심기 등의 장비를 탑재하였다.
2.2 현장 조사 및 분석 방법
ROV를 이용한 독도 인근 해역의 해저면 탐사일정은 2009년 5월 1일 부산항을 출항하여, 4일 울릉도에 도착 후, 울릉도 사동항에서 장비 테스트를 실시하고, 5월 6일 독도 남동편 심흥택 해산의 서쪽 경계선 부분에서의 첫 잠수조사를 시작으로 5월 15일까지 총 6 Dive정점에서 조사를 실시하였다(Fig. 5).
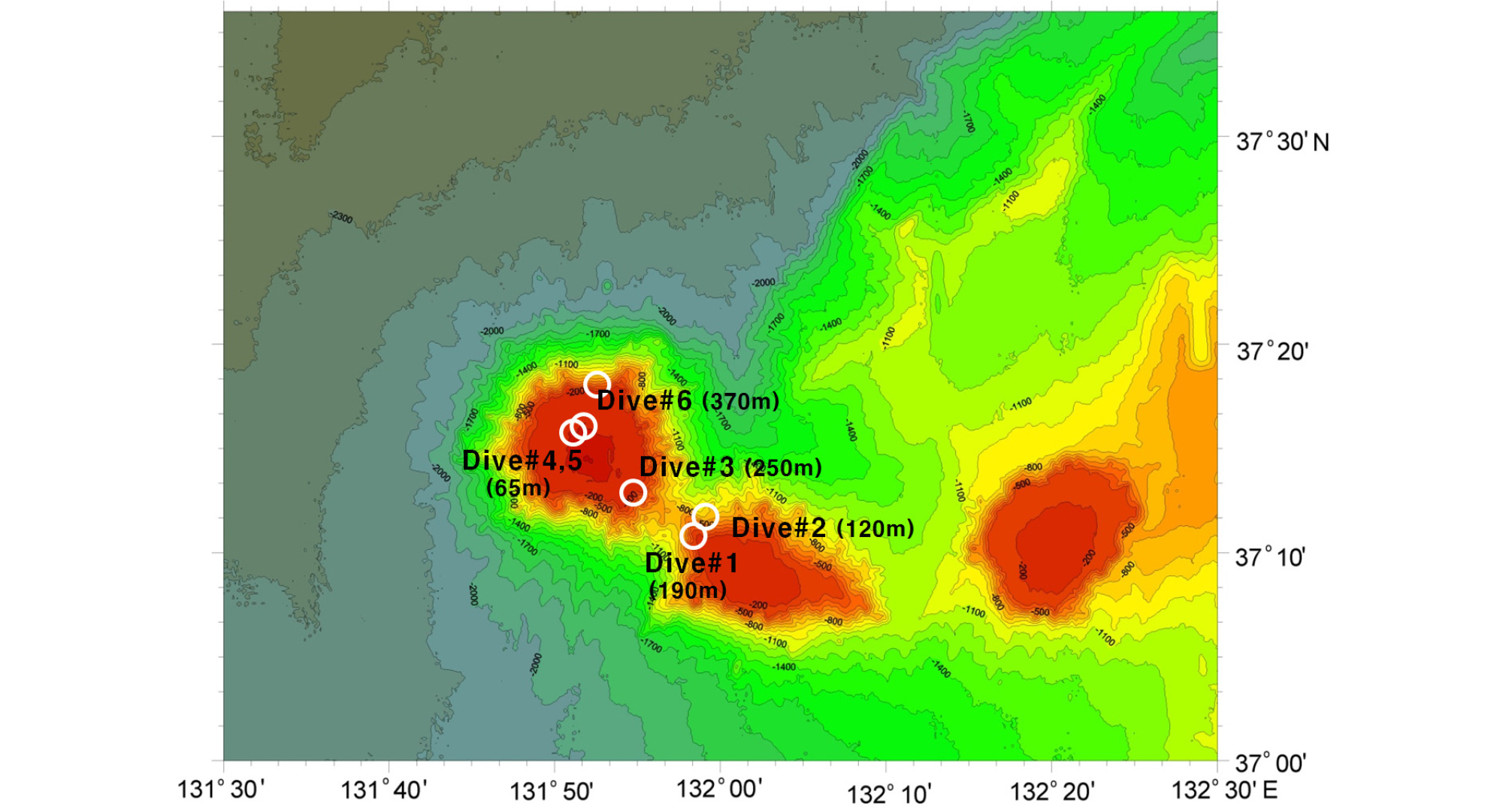
전체 조사해역의 수심은 45~370 m로, 심흥택 해산 좌측 심해 경사면 주변에서 2회, 독도의 남동쪽 급경사 해역에서 1회, 독도 북쪽 해역의 해양과학기지 설립 예정지와 수심 370 m 경사면에서 3회의 Dive 조사를 수행하여 총 6회의 잠수조사를 실시하였다. 파고 2.5 m 이상의 기상조건에서는 실해역 조사는 취소하고, 조사선 및 탐사장비에 대한 정비를 실시하였다. 안전한 조사를 위한 파고, 조류 및 바람에 대한 기상정보는 현재 독도 주변 해역에 설치된 독도관측부이의 실시간 관측자료를 통해 획득하였다(http://121.180.174.22/buoy/). 각각의 잠수시간은 조사목적과 장비의 상태, 해황에 따라 2~4시간 정도가 소요되었다. 조사안전을 위해 통발 등의 어구 설치지역은 피하였고, 주간에 조사를 수행하였다. 조사내용은 고해상도 비디오 카메라와 잠수정의 SD급 카메라를 통한 해저면의 해저지형 및 퇴적상 특성, 심해생물상 관찰이었다. 모든 잠수 조사 시 시간별로 잠수정 운용 및 관찰내용을 기록하였고, 조사 후 녹화된 자료와 대조하여 관찰된 내용과 시료 채집위치 및 환경정보를 참고하여 분석하였다. 출현한 생물 영상은 일본해양연구개발기구에서 발간된 잠수정 생물영상 도감 자료에 의해 동정하였다(Fujikura et al., 2008).
3. 결 과
3.1 Dive #1 (37°10.7373′N, 131°58.4192′E)
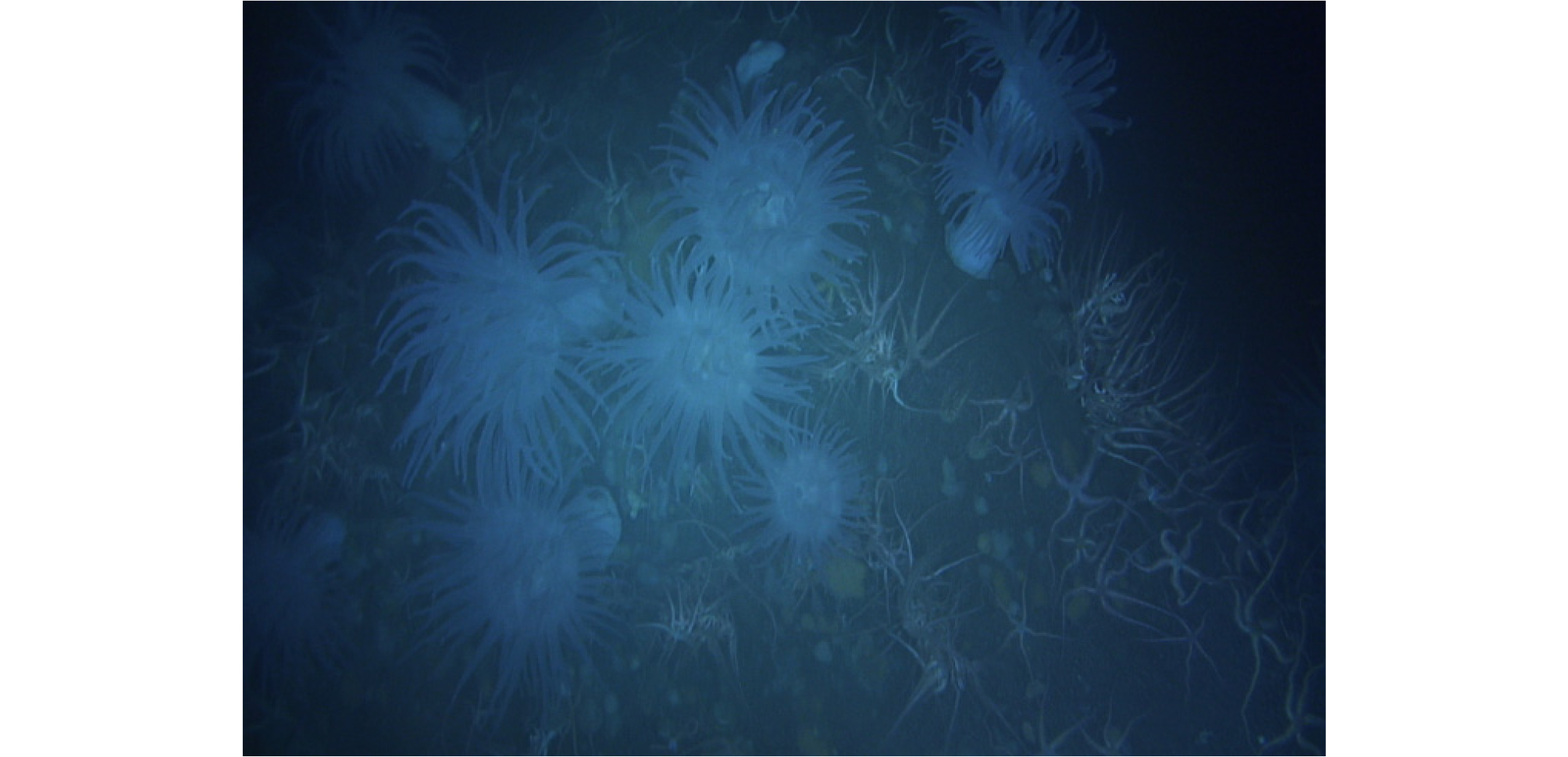
2009년 5월 6일에 이루어진 첫 잠수조사는 독도 남동쪽에 위치한 심흥택 해산의 서쪽 경사면을 대상으로 정점 Dive #1 위치에서 실시되었다(Fig. 5). 수층 생물상으로는 ROV가 하강하면서 간간히 부유성 해파리류와 유영성 어류가 출현하였다. ROV가 해저면에 착저한 수심은 184 m였으며, 해저면 수층에는 marine snow가 다량으로 존재하였고, 조립한 모래질로 보이는 연성저질에는 어류, 성게 등의 생물의 서식이 확인되었다. 수심 186~190 m 해저면에서는 높이 1~2 m 정도의 암석들이 산재하였고, 암반에는 부착성 생물인 심해말미잘류 Actinostolidae sp.와 거미불가사리류인 Ophiuridae sp.가 높은 서식밀도로 서식하고 있음이 확인되었다(Fig. 6).
높은 서식밀도를 보인 암석 지대 주변의 생물 군집과 환경특성을 더 탐사하고자 하였으나, 암반 사이에 교차된 통발줄이 발견되면서 ROV운항의 안정성 문제로 해저면 도달 20여분 만에 탐사를 중지하고 ROV를 회수하였다.
3.2 Dive #2 (37°10.0371′N, 131°58.3193′E)
2009년 5월 6일에 이루어진 두 번째 잠수조사는 독도 남동쪽에 위치한 심흥택 해산의 북서쪽 경사면을 대상으로 Dive #2에서 실시되었다(Fig. 5). Dive #1보다 깊은 수심의 심해저면을 탐사하기 위해 주변에 통발 부이가 없는 장소임을 확인하고 잠수조사를 시작하였다. Dive #1과 마찬가지로 ROV가 하강하면서 간간히 부유성 해파리류가 출현하였다. 수심 100 m를 통과하여 120 m에 다다랐을 때, 2 knots 이상의 강한 조류로 인해 ROV의 자율적 제어가 불가능해서 입수 후 50분 경과시점에서 더 이상의 탐사를 포기하고 장비를 회수하였다.
3.3 Dive #3 (37°13.0723′N, 131°55.3460′E)
2009년 5월 8일에 이루어진 세 번째 잠수조사는 심흥택 화산과 이어지는 독도 동남측 급경사면을 대상으로 Dive #3에서 실시되었다(Fig. 5). 기상상태는 맑았으나 약간의 바람이 부는 상태였으며, 파고는 1 m에 너울이 다소 있고, 수면의 조류는 1~2 knots 이하로 작업 환경은 그리 양호하지는 않은 편이었다. ROV를 하강시키면서 표층 5 m 부근에서 다수의 집단으로 유영하는 꽁치떼를 확인할 수 있었으며, 수심 50 m를 통과하면서 바다눈(해중설; marine snow)의 양이 증가하는 것을 관찰할 수 있었다. 조사 계획은 수심 300 m 부근의 해저면을 탐사하는 것이었으나 표층 조류에 조사선이 동쪽으로 표류하여 ROV의 수심한계를 넘는 수심 700 m 이하의 해역으로 밀리면서 수층 250 m까지만 ROV를 하강시켜 주변 생물상을 관찰한 후, 상승시켜 장비를 회수하였다.
조사선 코쌀 5호는 두 개의 엔진과 두 개의 스크류를 가지고 있어 제자리에서 회전하여 방향을 잡는 작업에는 유리하지만, 잠수정 운용에 필수적인 기능인 정위치를 유지할 수 있는 DP(Dynamic Positioning)기능이 없어서, 표층에 조류가 있을 경우, 일정위치를 유지하거나 ROV가 수층의 목적지로 운항하는 것은 상당히 어려운 조건을 가지고 있었다.
3.4 Dive #4 ( 37°15.0225′N, 131°51.5203′E)
2009년 5월 14일에 이루어진 네 번째 잠수조사는 독도 북서측 연안 수심 50 m 부근의 과거 독도해양과학기지 설치 예정 해저면을 대상으로 Dive #4에서 실시되었다(Fig. 5). 파고는 1~2 m에 너울이 다소 있고, 수중의 조류는 1~2 knots 정도로 양호하지 못한 해황상태였다. Dive #3에서 조사선이 표층해류에 밀리던 것을 고려하여, 음파송수신기 설치시간 동안 배의 움직임을 추적하여 동북방향의 흐름을 확인하고, 조사 목적지 남동방향의 500 m 떨어진 지점부터 ROV 입수를 실시하였다. 그러나, 케이블에 추를 장착하는 동안 많은 거리를 표류하여 ROV가 착저했을 때는 조사 예정지에서 이미 800 m 이상 벗어난 상태가 되었다. ROV가 이동되면서 수심 65 m 이상의 해역에서 상승시켰다. 바닥의 퇴적상은 암반들이 많이 분포하고 있고 그 암반들 사이사이에 굵은 모래질로 보이는 퇴적물이 관찰되었으며, 굴곡이 있고 높이가 1 m 이상으로 예상되는 암반들이 나타나기도 하였다(Fig. 7).
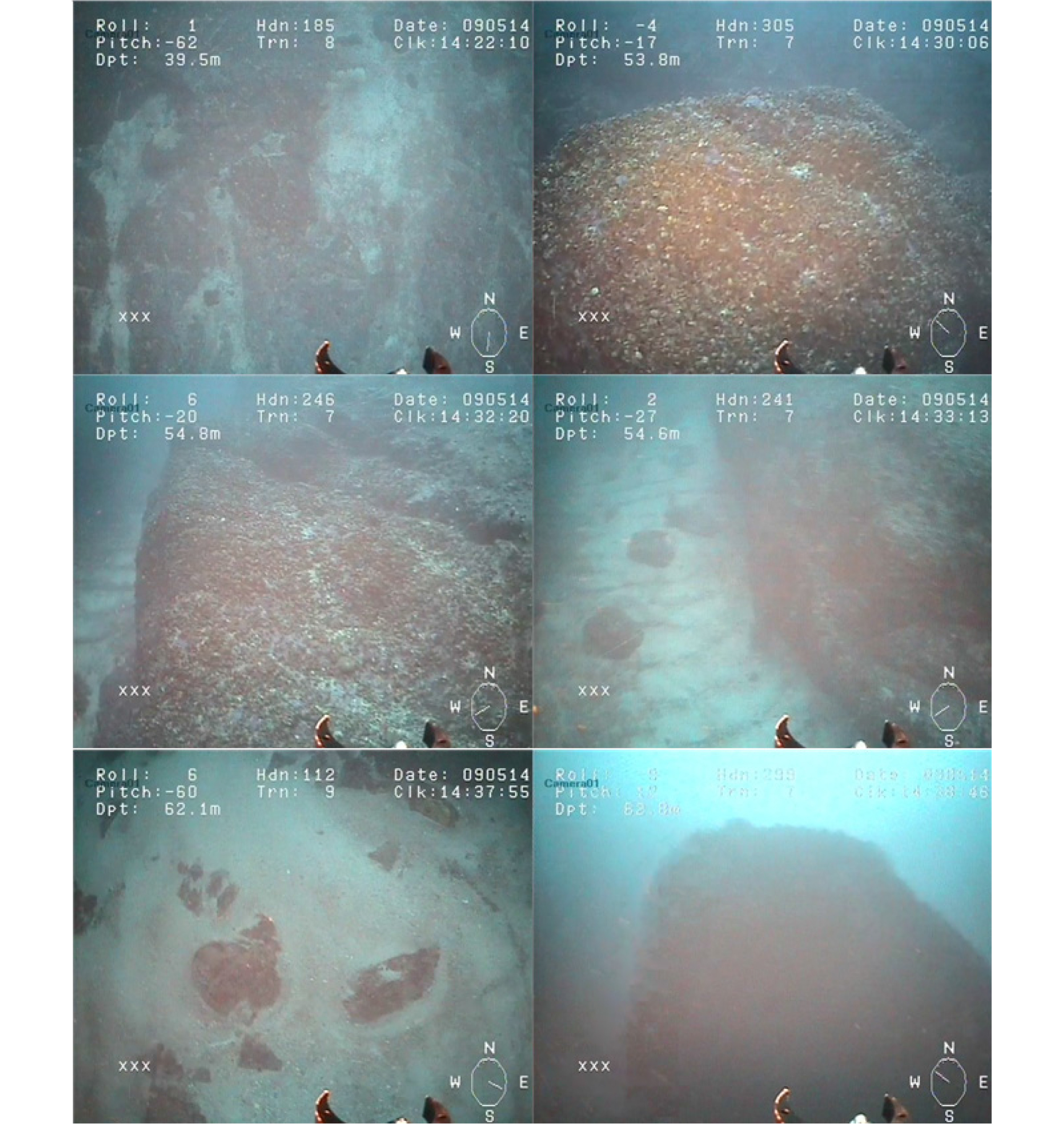
암반과 암반 사이에 연흔구조가 나타나는 퇴적물들이 분포하고 있어서, 이 지역이 파도에 의한 영향으로 많이 받는다는 것을 확인 할 수 있었다. 이 구역의 암석 표면에는 조류 또는 저서생물이 많이 부착되어 있어 암석 동정에 어려움이 있었으나 커다란 암괴는 두꺼운 괴상 용암(thick massive lava)에서 유래한 것으로 보이며, 그 주변의 작은 암편 역시 각진 형태를 지니고 있어 용암에서 떨어져 나온 후 거의 운반 및 마모의 과정을 거치지 않은 화산암편으로 판단되었다. 조사 목적지와는 다소 거리가 멀어진 위치에서 수층 상부에서 ROV를 운항하여 예정 정점까지 이동하려 하였으나, 조류를 대면하여 운항하기에는 속도가 나지 않고 선상에서의 케이블 각도 문제 등으로 장비를 회수하여 다시 투하 적절한 지점으로 이동하였다.
3.5 Dive #5 (37°15.1181′N, 131°51.6905′E)
2009년 5월 14일에 Dive #4에 연이어 실시된 Dive #5는 조사 예정지인 해양과학기지 설치 해저면에 정확히 도달하기 위하여 표층 해류의 이동 반대방향의 약 1 km 전방으로 이동하고 최대한 빠른시간에 케이블에 웨이트를 장착하여 조사 목적지까지의 운항 오류를 줄이는 방향으로 진수 및 잠수조사를 실시하였다. 배의 흐름에 맞춰 빠르게 ROV를 하강하여 과학기지 설치 예정해역의 구간에 ROV가 도달한 위치는 37°15.1181′N, 131°51.6905′E이며, 약 10분 정도 이동하면서 해저면의 퇴적상과 암반 구조물의 영상을 확보하였으며, 상승하기 시작한 위치는 37°15.1623′N, 131°51.7674′E로서 북동쪽으로 진행한 것으로 나타났다. 해저면은 조사 초반부에 일부 모래지역과 평평한 암반지역이 우세하다가 북동쪽으로 진행하면서 비교적 큰 돌무더기와 암석들이 나타나고 큰 바위들이 산재하는 양상을 보였다. 이 지역도 Dive #4번과 마찬가지로 모래퇴적물에서 연흔구조가 나타나며 두꺼운 괴상용암에서 유래된 암석들이 많이 분포하는 것으로 보인다.
3.6 Dive #6 (37°18.1443′N, 131°53.3728′E)
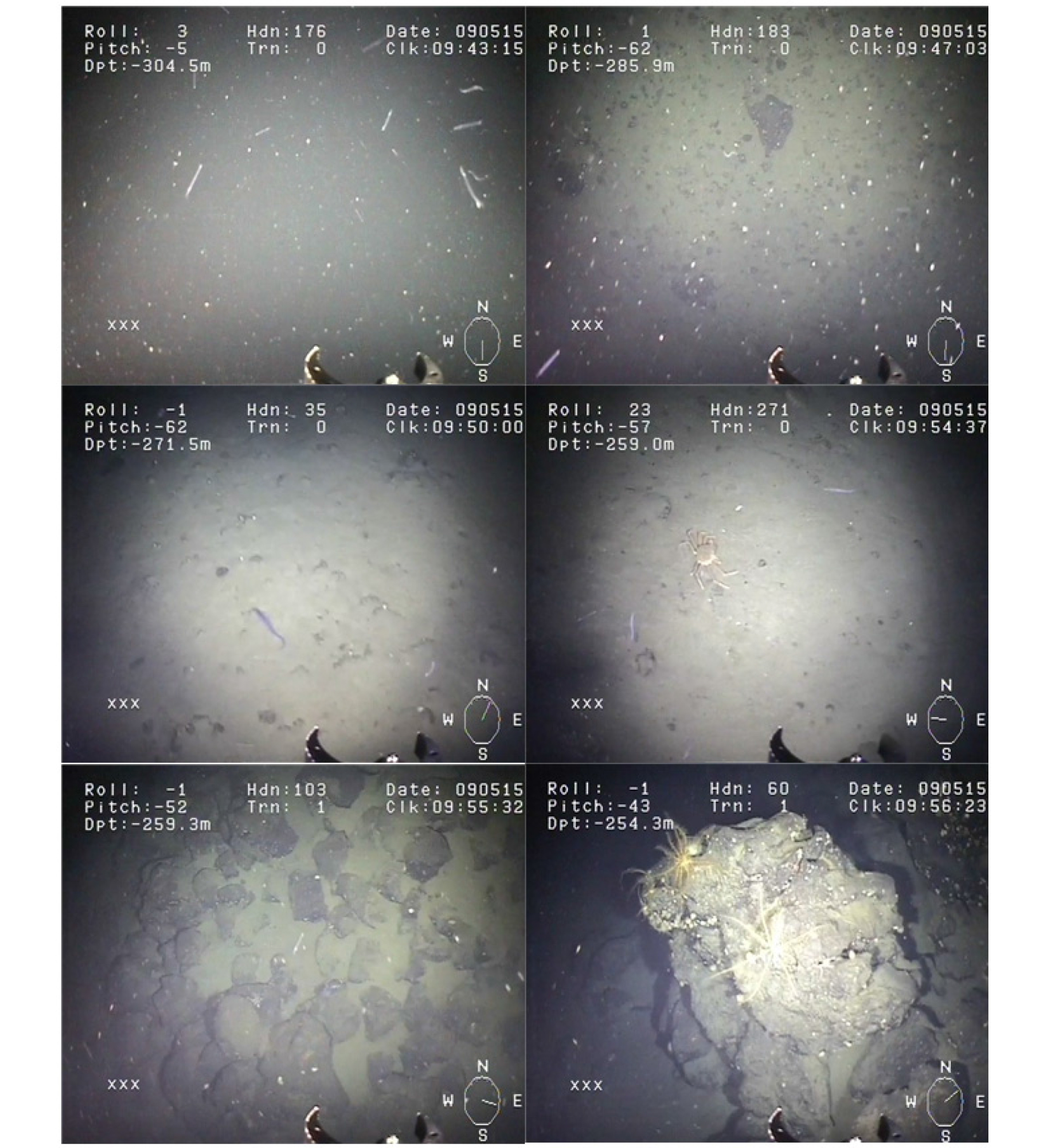
2009년 5월 15일에 이루어진 마지막 잠수조사는 독도 북쪽에 위치한 심해 급경사면을 대상으로 실시되었다(Fig. 5). 전날 이루어진 Dive #4, #5와 마찬가지로 급경사면의 조사수심 한계를 넘어가지 않는 범위에서 조사할 수 있도록, 표층 해류의 이동방향과 속도를 측정하고, 이에 따라 잠수정 입수 위치를 선정하였다. 기상상태는 흐리고 다소 바람이 부는 상태였으며, 파고는 1.5~2 m에 약간의 너울이 있고, 수중의 조류는 1 knot 정도로 작업하기에 다소 불량한 조건이었다. 그러나 수중에서는 지금까지의 잠항에 비하여 비교적 안정된 상태에서 조사가 진행되었으며, 수심 370 m 이하의 해저면에 성공적으로 도달하여 심해 생태계와 독도 급경사면의 영상을 확보할 수 있었다. ROV가 하강하면서 수심 40 m를 통과하면서부터 해중설의 양이 증가하는 양상을 보였으며, 군체를 이루는 해파리류와 소형 유영 생물이 출현하였다. ROV가 입수 후 약 35분 후 수심 365 m의 해저면에 도달하였는데, 니사질 퇴적상이 주로 분표하며 군데군데 작은 암편이 보이는 지형을 나타냈다(Fig. 8). 이 암편들도 화산기원의 암편으로 추정되는데, Dive #4, #5의 암석과 비교하여 암편의 형태가 매우 불규칙(irregular)하거나 유동형(fluidal)이라는 차이점을 보였다. 이런 암편은 주로 육성 용암에 의해 만들어지기 때문에 이 지점의 암석들은 해수면 위로 분출했던 용암이 나중에 사면붕괴 등의 과정을 통해 해저면에 쌓인 것으로 해석된다. 비교적 크기가 큰 암석들이 나타나면서 부착성 생물들이 출현하였으며, 대게류, 어류, 해삼류, 말미잘류 등이 관찰되었다. 모악동물류인 화살벌레(Sagitta sp.)로 보이는 부유성 소형 생물들이 매우 높은 서식밀도로 해저면 부근에 밀집해있었으며, 대게류 및 어류 등 일부 생물들은 ROV가 접근하면 긴급히 회피하는 동작이 두드러지게 보였다.
4. 고 찰
최근에 들어 심해평원 및 열수분출공 지역과 같은 심해의 특수 극한 생태계에 대한 관심이 세계적으로 더욱 높아지고 있다. 이미 수십 년 전부터 첨단 연구용 잠수정 등의 최첨단장비를 보유하고 연구를 진행해 온 선진 국가에서들은 심해로부터 인간에게 유용한 물질을 추출하려는 적극적인 시도를 보이고 있다(MOF, 2014b; DSBS, 2015). 이러한 현상은 우리나라와 같이 아직 심해를 연구하기 위한 기반 장비나 기기가 충분히 마련되어 있지 않은 국가들에게는 아주 시급한 과제로 부상되고 있다. 우리나라에서도 근년에 들어 이의 중요성을 인식하여, 과거부터 수행되어온 심해저 자원탐사와 더불어 심해 생물 및 열수 생물에 대한 연구가 진행되고 있는 실정이다(MOF, 2014a; DSBS, 2015). 하지만 아직 연구자가 많지 않고, 앞서 언급한 기기나 장비 등의 지원이 충분하지 못하기 때문에 주로 국외의 장비를 활용하여 이루어지고 있는 실정이다(MOF, 2014a). 따라서 이러한 연구는 앞으로 국가의 적극적인 지원이 요구되어진다 할 수 있다(MOF, 2014a, Jin et al., 2014). 특히, 심해는 우리나라에서 가장 넓은 면적을 가지는 바다인 동해의 대부분을 차지하고 있을 정도로 중요한 해양 공간이다(NFRDI, 2001). 본 조사가 이루어진 독도주변 해역은 입지 조건상 심해연구의 최적지라고 볼 수 있는데, 이는 심해 생물다양성에 매우 중요한 곳으로 알려진 심해 해산구조로 되어있으며(DSBS, 2015), 연안에서 급경사면을 따라 심해 분지에 이르는 수심대별 심해생태계를 연속선상에서 관찰할 수 있는 곳이기 때문이다(MEST, 2009). 그러나 지금까지 이루어진 독도 주변의 심해생물에 대한 조사는 무작위 채집 장비인 상자형 채니기(box corer), 그랩(grab), 드렛지(Dredge) 및 저층 트롤 어구에 의존해왔다(Park et al., 2007; Sohn et al., 2010). 심해에 서식하는 저서생물 채집용으로 가장 많이 사용하는 상자형 채니기는 연성저질 일부의 퇴적물에 내생하는 일부의 중소형 생물만을 채집할 수밖에 없으며, 드렛지의 경우 채집 효율이 매우 떨어지고, 독도 주변처럼 불규칙한 암반 및 암편이 산재한 지역에서는 사용할 수 없으며, 채집이 되더라도 주변 생태계를 교란하거나 파괴하는 형태의 채집이 이루어지는 단점을 가지고 있어, 시각적 조사를 위주로 진행되는 ROV 조사가 병행 요구되는 상황이라고 볼 수 있다. 해저지형, 퇴적 및 해양 광물자원 분야에서도 기존의 음향장비를 이용한 원격조사와 채니기에 의한 주상 코어나 드렛지를 통한 조사로는 파악할 수 없는 정밀한 지형, 정확한 위치의 퇴적상 및 광물성 자원의 부존량 조사를 위해서는 ROV에 의한 시각적이고 정밀한 조사 자료는 환경을 해석하고 분석하는 데는 핵심이 되는 중요한 정보를 제공할 수 있다(National Research Council, 1996, 2003, 2004; Monastersky, 2012). 이런 ROV 조사의 장점을 부각시키기 위해 본 조사는 기존의 간접적 방식의 일반 해양학적 접근의 심해연구에서 벗어나, 비용과 접근성 측면에서 활용가능성이 높은 소형 ROV를 이용하여 독도 주변해역의 주요 정점에 대하여 실제 영상을 얻고, 향후 활용 가능성을 시험하고자 시도되었다. 심흥택 해산 주변의 심해역에서 2회, 독도의 남동쪽 급경사 해역에서 1회, 독도 북쪽 해역의 해양과학기지 설립 예정지와 수심 370 m 경사면에서 3회의 Dive 조사를 수행하였다. 심흥택 해산 평탄부에서 심해역 경사면에 이르는 고밀도 생물상을 가지는 주변 생태계 및 화산활동 성인을 가지는 해저면 특성을 시각적으로 확인할 수 있는 영상자료를 확보하였고, 방송프로그램 제작 협조를 통한 다큐멘터리 방영으로 대국민 홍보자료로서의 활용되기도 하였다(2009년 5월 30일 KBS 1TV ‘과학카페-바다의 날 기획 최초공개 독도 심해탐사'). 실제적으로 국내의 해산 정상부와 주변 경사면의 실제 영상을 얻은 최초의 조사로서 의미를 가진다.
본 탐사에 사용된 장비는 중형급(medium work class, 1톤 이상)과 소형급(mini observation class, 15kg 내외)의 중간 정도 규모에 해당되는 ROV로서 수심 500미터까지 조사가 가능한 성능을 가졌다. 이러한 중소형 ROV는 대형 ROV에 비하여 개발 혹은 구입 비용이 상대적으로 매우 저렴하며, 작은 선박과 적은 인력으로 운용이 가능하다는 장점이 있어, 국외에서는 많은 연구기관 및 대학, 기업체에서 다양한 목적으로 활발하게 사용되고 있다(National Research Council, 2004). 국내 기술로 개발된 6,000 m급 대형 ROV인 한국해양과학기술원의 해미래와 외국의 임차해서 사용할 수 있는 연구용 대형 ROV는 현실적으로 동해의 심해에서 사용하기에는 그 비용과 규모면에서 제한이 많기 때문에 상대적으로 저 비용에 효과적으로 결과물을 얻을 수 있는 소형 ROV를 활용 방법을 개발하고 적용하는 것이 합리적인 전략이 될 것으로 판단된다. 이에 이번 탐사를 진행하면서 향후 보완되고 지원되어야 할 몇 가지 개선점을 제시하자면, 먼저 기술 설비측면에서 1) DP system (Dynamic positioning system: 정위치를 유지해주는 장치)의 지원이 가능한 조사용 소형 ROV 지원 선박의 확보 2) 간단한 시료를 채집할 수 있는 최소의 기능을 가진 로봇팔 3) 4K 급의 고해상도 비디오카메라의 탑재 4) 디스플레이 및 저장된 영상을 분석할 때 단위면적당 밀도(현존량)개념이 들어갈 수 있도록 레이저 스케일러 설치 등으로 요약할 수 있다. 특히, 이번 탐사에서 심해 해저면에서 ROV가 계속 롤링과 피칭이 심하게 나타나서 안정된 영상을 획득하기가 어려웠는데, 이는 정위치를 유지해주는 DP시스템의 부재와 수동적인 케이블 조작 미숙으로 인한 개선점이라고 판단된다. 또한 이번 탐사 기간 동안 ROV 탐사에 위험한 장애물이 될 수 있는 어구들이 해저면에 많이 존재하는 것을 확인하였는데, 이를 극복하고 탐사를 진행할 수 있는 전방 음파탐지 및 어구에 걸렸을 경우 탈출 방안이 필요하다. 이번 탐사에 이용된 장비는 수심 한계가 500 m로서 2,000 m 이상까지 급경사로 되어 있는 독도 주변의 분지해역에서 사용하기에는 사용 수심대가 다소 무리가 있을 것으로 생각되며, 소형보다는 이동능력이 뛰어나고 비교적 다양한 기능과 작업 수행 능력을 가지는 1톤급의 수심 3,000 미터까지 탐사 가능한 중형급의 ROV와 전용 연구모선의 확충도 좋은 대안이 될 수도 있을 것이다(National Research Council, 2004). 본 조사에서 활용된 소형급의 ROV는 수심 200 m에서 400 m의 해산 정상부의 생태계 및 심해 환경 연구에 최적일 것으로 생각되며, 향후 동해 전체에 대한 심해 연구를 기획한다면, 적어도 3,000 m 급 중형 ROV가 유리할 것으로 생각된다. 또한, 성공적이고 효율적인 탐사가 되기 위해서는 국내에 거의 부재한 전문 기술인력 및 조사 지원 인력의 확보가 필요할 것이다. 또한 이러한 일련의 연구는 관련학문 및 탐사장비 등의 개발을 위한 전문 산업체와의 연계가 반드시 필요하게 될 것으로 본다. 본 조사의 경험과 결과가 앞으로 독도 주변해역을 중심으로 우리나라의 동해 심해 및 특수한 생태계 연구를 위한 기본 영상자료 제공이나 탐사를 위한 기획에 조금이나마 보탬이 되기를 기대한다.
